教員一覧
FACULTY LIST

Moju Zhao
Moju ZhaoLecturer
- Hongo Campus
- Department of Mechanical Engineering
- Graduate School of Engineering
- RESEARCH
-
- Dexterous Aerial Manipulation by Transformable Aerial Robot
- Autonomous Surveillance by Multimodel Sensing
- Cooperative Air-Ground Robotic System for Surveillance and Inspection
- RESEARCH DETAILS
- Autonomous surveillance and inspection system in both indoor and outdoor environments by aerial and ground robots. For such a system, robots are required to have both mobility and the manipulation ability. Thus the research topics about intelligent robotics, such as realtime control, multimodel sensing, and system integration, are focused in our work.
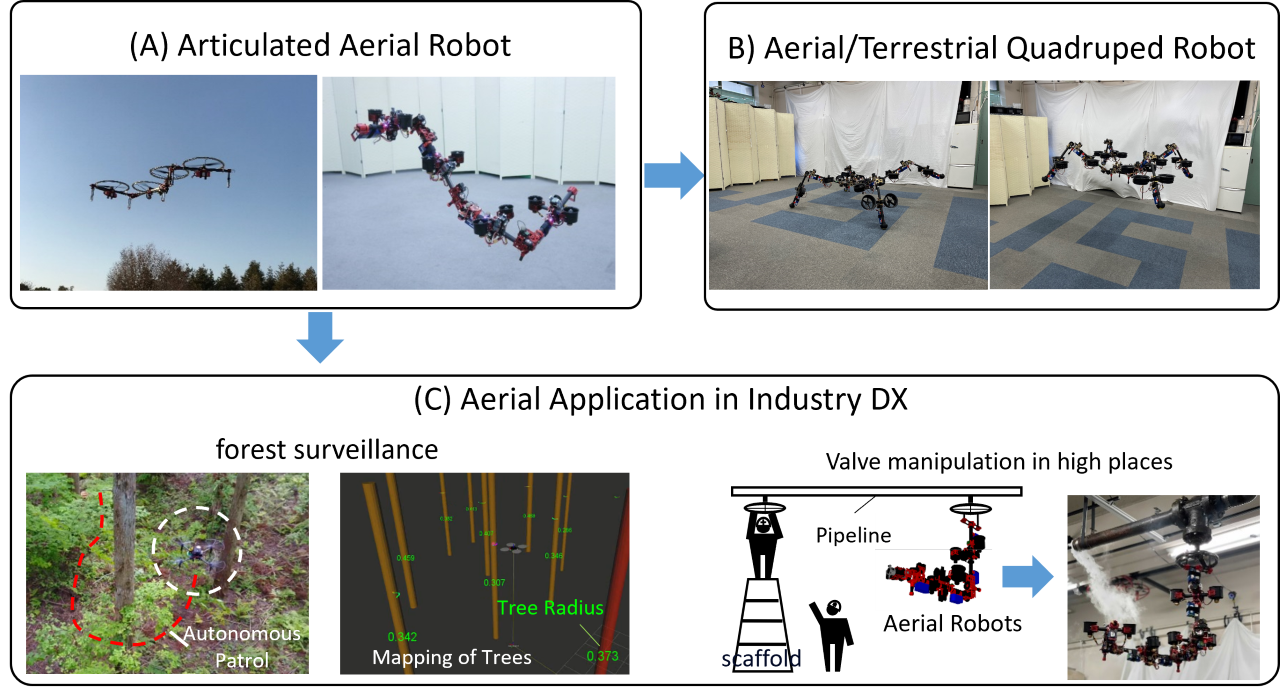 Development of intelligent application achieved by different robot platforms
Development of intelligent application achieved by different robot platforms