教員一覧
FACULTY LIST

Yuji Yamakawa
Yuji YamakawaAssociate Professor
- Komaba Campus
- Graduate School of Engineering
- Institute of Industrial Science
- Interfaculty Initiative in Information Studies
- RESEARCH
-
- Development of high-speed robot system
- Study on human-robot collaboration
- Study on dynamic manipulation
- Study on vision sensor network
- Study on intelligent production system
- RESEARCH DETAILS
- By connecting various sensors on the network, centered on high-speed vision, we construct sensor network systems to quickly and comprehensively recognize the real world. Then we also feed back to actuation systems (robots etc.) in real time. Using these technologies, we aim to develop high-speed intelligent systems that realize dynamic interaction with the real world.
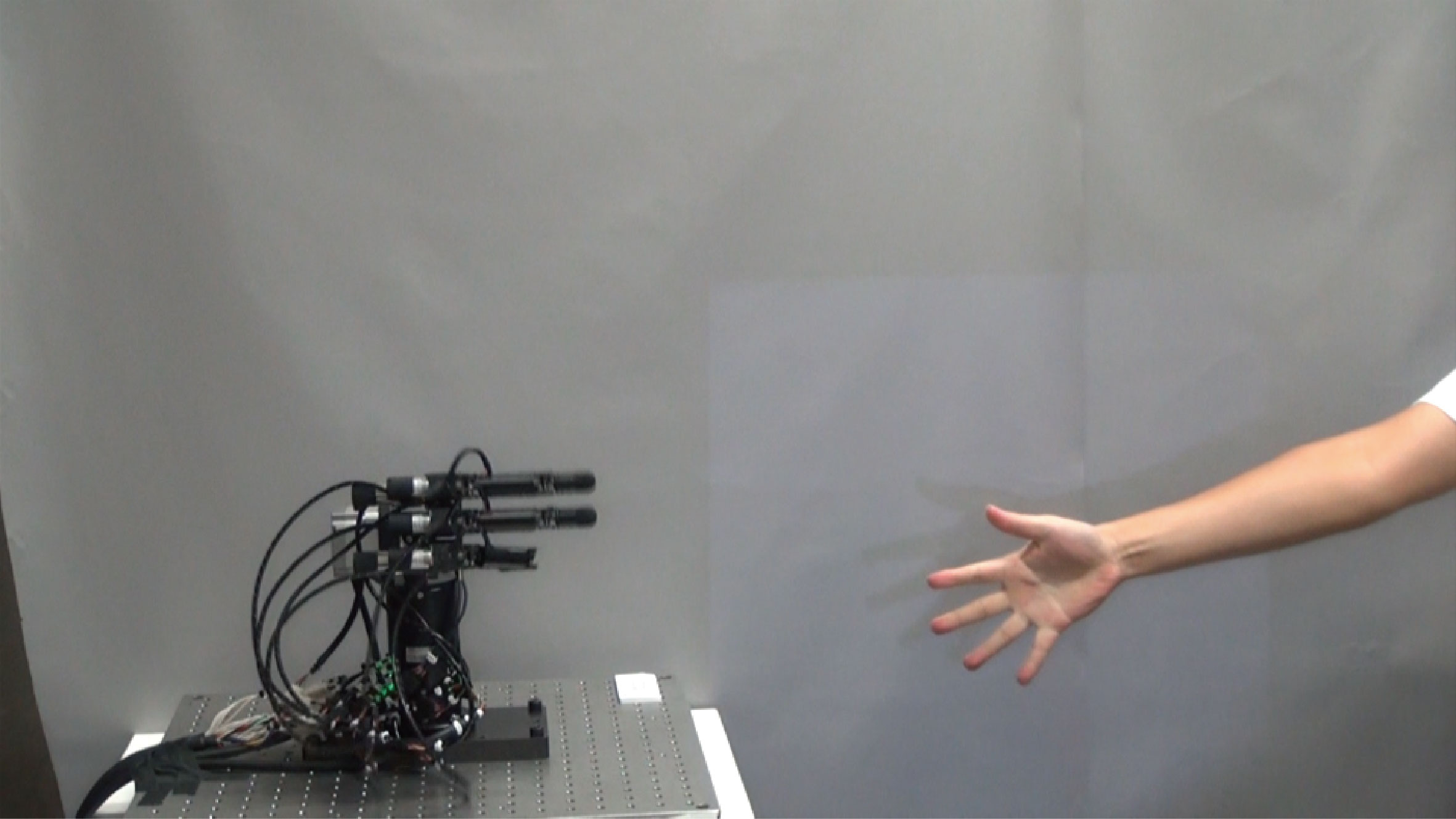 Janken (rock-paper-scissors) robot with 100% winning rate
Janken (rock-paper-scissors) robot with 100% winning rate