教員一覧
FACULTY LIST

Moju Zhao
趙 漠居講師
- 本郷キャンパス
- 機械工学科
- 工学系研究科
- RESEARCH
-
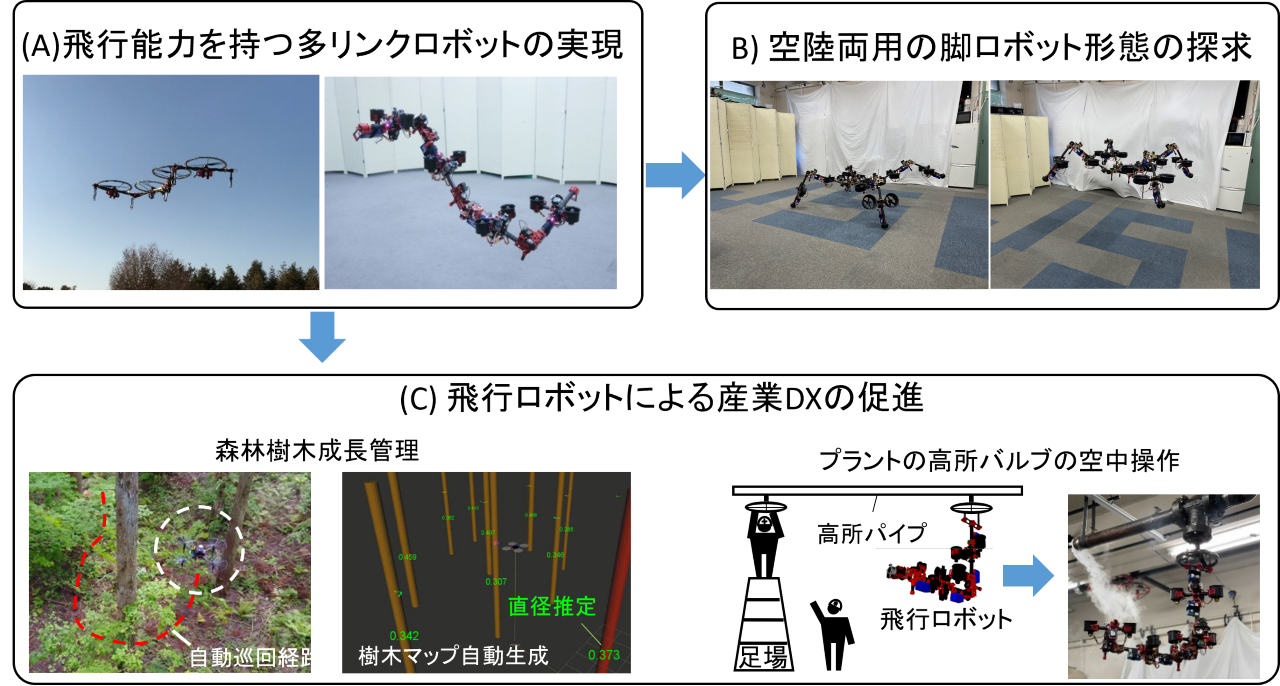
- 多リンク系飛行ロボットの空中マニピュレーション
- 多種センサを用いた屋内外での自律見回りロボット行動
- 地上・空中ロボット間連携による複数領域からの環境知覚
- RESEARCH DETAILS
- ロボットによる工場や森林での自動見廻り検査に関する研究を行っている.このような環境において,地上・空中から対象領域にアプローチし,そこで視覚をはじめとする様々なセンサを活用して異常雰囲気を知覚するロボットのシステム構築が必要不可欠である.そこで,地上だけではなく空中でも移動と操作の双方の能力を有するロボットの構成法を目指し,実時間制御法やセンサ情報処理、システム統合法といった知能ロボティクスの各要素に携わっていく.
-
ロボット、地上・空中ロボット、知能ロボティクス
 多種多様なロボット形態に適用できる知能行動システムの構築
多種多様なロボット形態に適用できる知能行動システムの構築